Shanghai Genius Industrial Co.,Ltd


| Place of Origin: | China |
|---|---|
| Brand Name: | Genius Robotics Zhenkang |
| Certification: | CE , ISO9001 , ISO14001 |
| Model Number: | RV-160E |
| Minimum Order Quantity: | 1 set |
| Price: | Negotiation |
| Packaging Details: | Carton packing |
| Delivery Time: | 5-10 Working days |
| Payment Terms: | T/T, L/C |
| Supply Ability: | 5000 / month |
| Allowable Torque: | 3900Nm | Torsional Rigidity: | 390 Nm/arc.min |
|---|---|---|---|
| Speed Ratio: | 81 / 101 / 129 / 145 / 171 | Output Speed Max: | 45 R/min |
| High Light: | Antirust Paint Cycloidal Gearbox,Heat Dissipation Cycloidal Gearbox,Light Weight Cycloidal Gearbox |
||
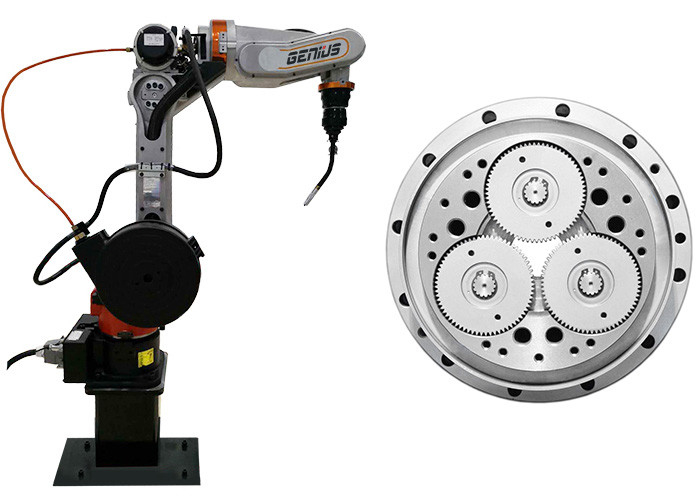
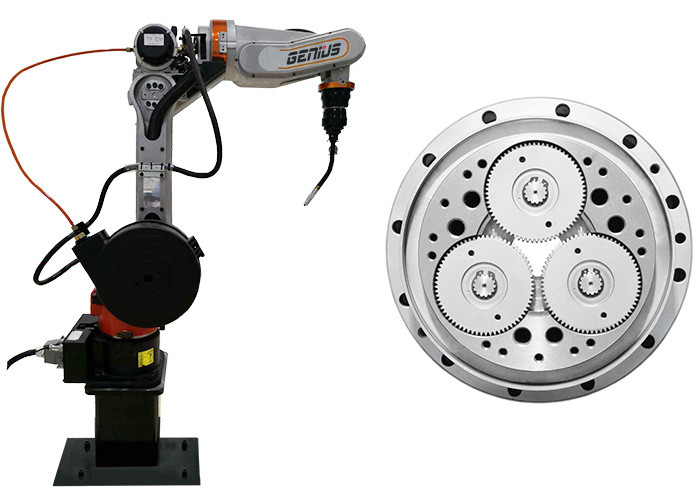
Heat Dissipation Antirust Paint Cycloidal Gear Reducer RV-160 Nabtesco Light Weight
Cycloidal Gear Reducer is mainly composed of cycloidal wheel, eccentric shaft and pin gear shell. It has the characteristics of compact structure, large transmission ratio, low vibration, low noise and low energy consumption. The existence of rv reducer makes the servo motor at a suitable speed. Under the operation, and accurately reduce the speed to the speed required by various parts of the industrial robot, improve the rigidity of the mechanical body while outputting a larger torque.
The Cycloidal Gear Reducer has much higher fatigue strength, stiffness and life than the harmonic drive commonly used in industrial robots, and the return accuracy is stable. Therefore, RV gearboxes are often used in high - precision industrial robot transmissions in many countries in the world. The development trend of reduction gears for industrial robots is high - speed reduction ratio, small volume, high bearing capacity, high efficiency and long service life.
Cycloidal Gear Reducer RV-160E technical parameters
Operating parameter
| Output Rotational speed r/min |
5 | 15 | 25 | 35 | ||||
| Output torque | Input capacity | Output torque | Input capacity | Output torque | Input capacity | Output torque | Input capacity | |
| Model | Nm | kW | Nm | kW | Nm | kW | Nm | kW |
| 160E | 2215 | 1.49 | 1600 | 3.41 | 1358 | 4.77 | 1215 | 5.89 |
Note: the rated torque is the output torque when the output speed is at 15r/min.
Performance Parameter
| Model | Speed ratio | Allowable output speed | Maximum backlash | Allowable acceleration/decleration torque | Momentary max allowable torque | Allowable moment | Momentary max allowable movement | Weight | Efficiency | Noise | |
| 160E | Shaft(R) | Housin | r/min | arc.min | Nm | Nm | Nm | Nm | kg | % | dB |
| 81 | 80 | 45 | 1 | 4000 | 8000 | 3840 | 7680 | 26.4 | >80 | <75 | |
| 101 | 100 | ||||||||||
| 129 | 128 | ||||||||||
| 145 | 144 | ||||||||||
| 171 | 170 | ||||||||||
Cycloidal Gear Reducer backlash and empty trip
![]()
Cycloidal Gear Reducer efficiency
All E - Series gearboxes are rated for > 80 % efficiency.
40E efficiency example
![]()
Cycloidal Gear Reducer noise
The gear unit is operated at rated speed with a noise of < 75 dB.
The noise level is related to installation accuracy, lubrication, temperature, load and other factors.
Cycloidal Gear Reducer torque
![]()
Cycloidal Gear Reducer working torque maximum: refers to the maximum torque of the reducer during start, steady operation and stop.
Typically, the starting and stopping torque is approximately 2.5 times the rated torque;
The torque during steady operation is lower than the rated torque.
Cycloidal Gear Reducer maximum impact torque: refers to the maximum torque that the reducer can withstand when subjected to external shock or emergency stop.
Note that the impact torque should be avoided as much as possible, otherwise the performance of the reducer will decrease.
Cycloidal Gear Reducer bending moment
![]()
Cycloidal Gear Reducer maximum working moment: refers to the maximum bending moment of the reducer during start - up, stable operation and stop.
The working bending moment is borne by the deep groove ball bearing inside the reducer, and the speed reducer should not exceed its maximum value when it is running.
Cycloidal Gear Reducer maximum impact moment: refers to the maximum bending moment that the reducer can withstand when subjected to external impact or emergency stop.
Note that the impact bending moment should be avoided as much as possible, otherwise the performance of the reducer will decrease.
Cycloidal Gear Reducer RV-160E Installation parameter
| inner hexagon bolt Nominal dimension(mm) |
fastening torque(Nm) | fastening force | bolt requirement |
| M8 × 1.25 | 37.2 ± 1.86 | 23960 | GB/T 70.1 - 2000 intensity:12.9 thread requirement:GB/T 1167-1996 |
| M16 × 2.0 | 318.5 ± 15.9 | 103410 |
Cycloidal Gear Reducer RV-160E installation drawings
![]()